– tecnología A.C. o M.F.D.C.;
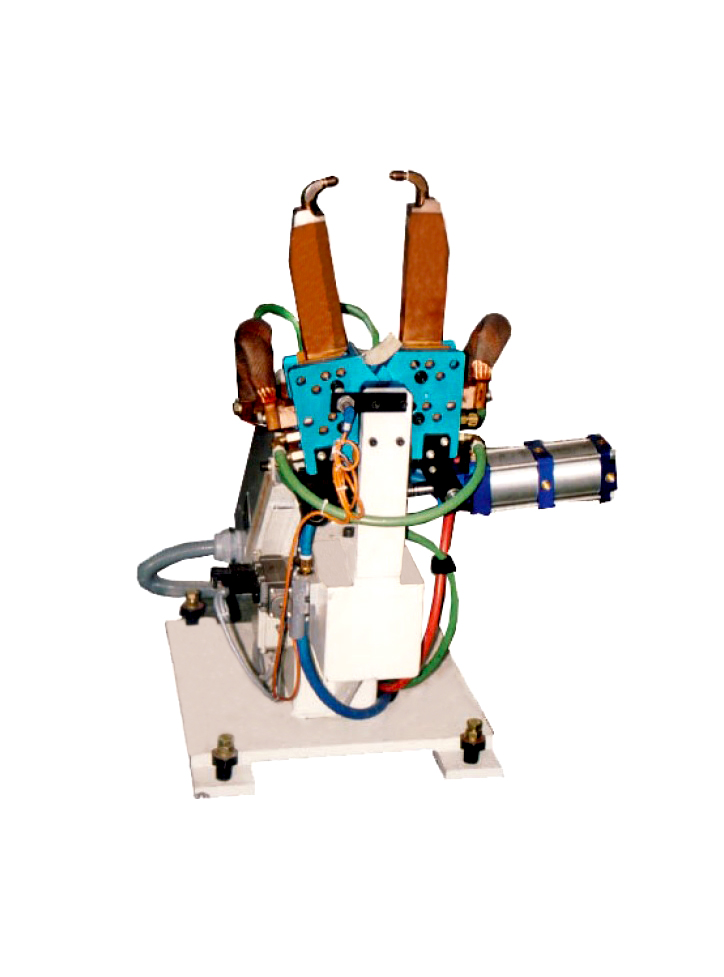
– Con transformador integrado o mediante conductores flexibles o cables secundarios;
– Potencia (50% F.S.) – 45 a 200 kVA;
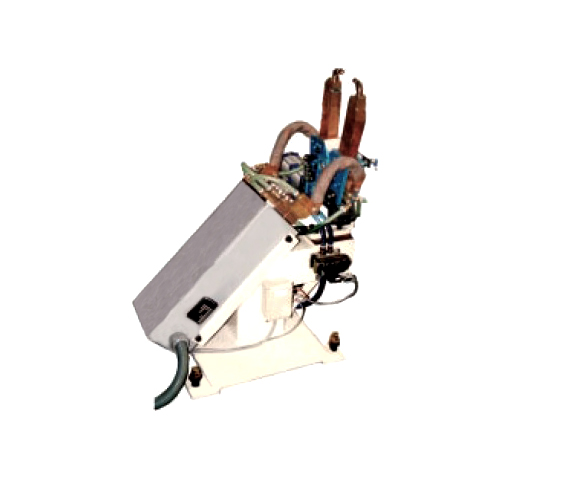
– Accionamiento neumático o servoeléctrico;
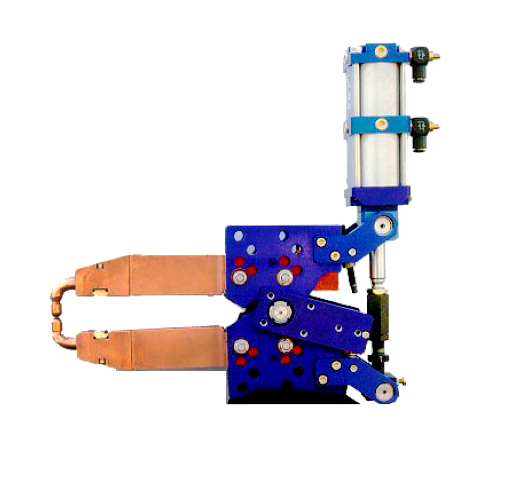
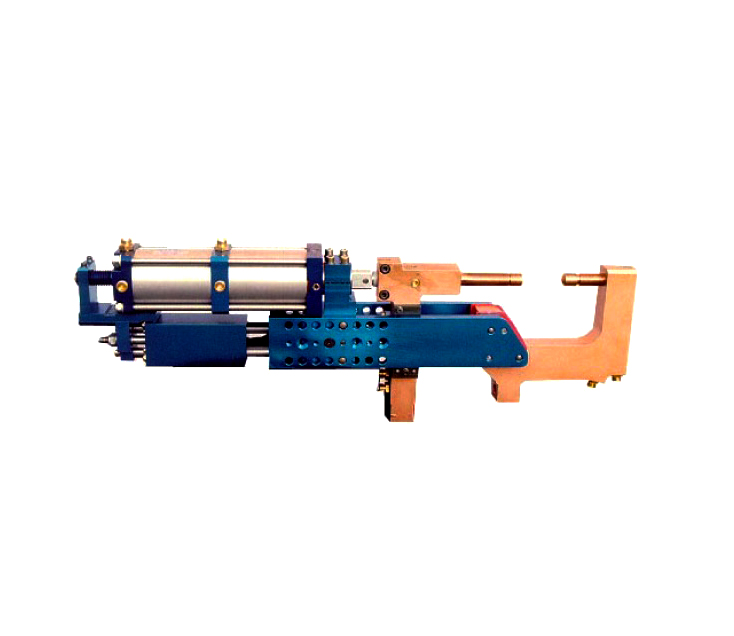
– Configuraciones en C y X;
– Conjunto de paquetes de mangueras y cables altamente flexibles, con varias longitudes y posibles configuraciones;
– Brazos fabricados en CuCr, o Latón o aleación de aluminio de alta resistencia, y portaelectrodos en CuCrZr, diseñados de acuerdo con la accesibilidad necesaria;
– Soportes para fijar la pinza al robot en varias configuraciones posibles, incluida la fijación al suelo;